Fakir Robert Teardown
Da ich mir demnächst mal einen neuen gebrauchten Saugroboter holen werde, auf dem ich plane, Valeduto laufen zu lassen, habe ich meinen alten Saugroboter mal auseinander genommen.

Bei dem Fakir Robert handelt es sich um einen recht “einfachen” Saugroboter, der nach der Strategie “bei Anfahren drehen und weiterfahren” handelt. Zudem hat er einen Modus, in welchem er spiralförmig nach außen fährt.
Er reagiert zudem auf IR-Trennwände (und direktes Sonnenlicht, wie ich kürzlich erfuhr), und hat auch eine Fernbedienung dabei.
Die Demontage ist relativ trivial. Man beginnt am Besten mit dem Akku.
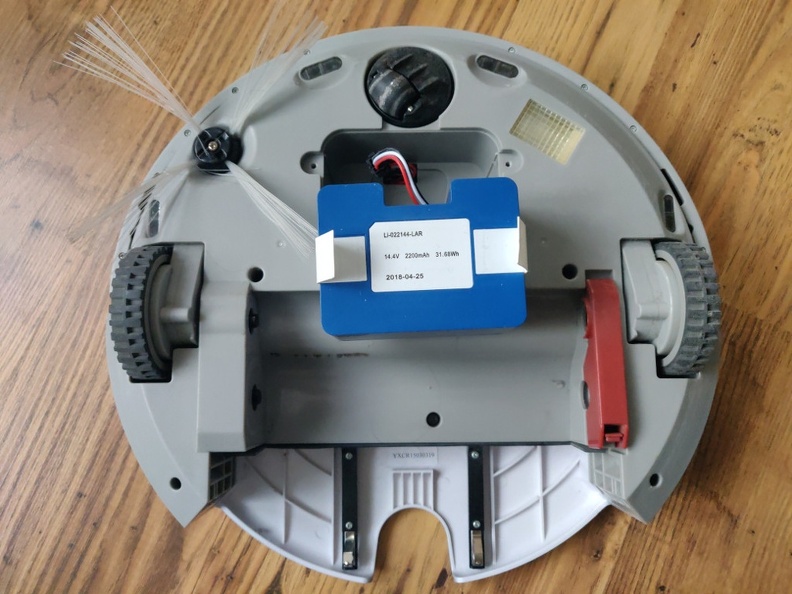
Danach entfernt man nacheinander die anderen Schrauben aus den gut erkennbaren Löchern. Auch der “Wedel” muss entfernt werden.
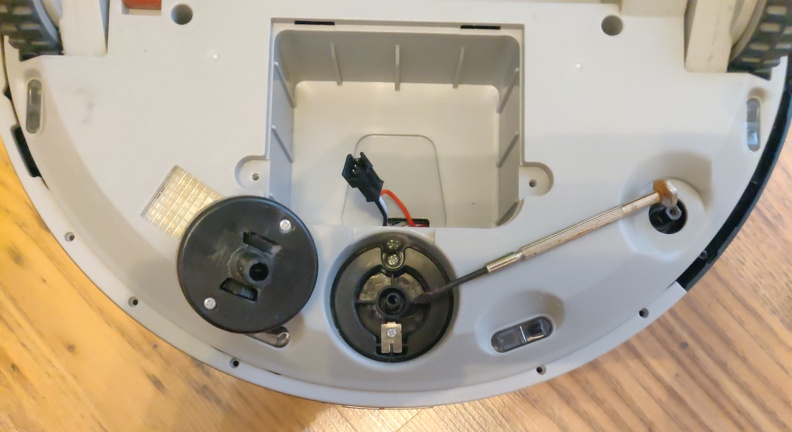
Das “größte” Hinternis bei der Demontage war die Schraube, die unter dem Vorderrad versteckt war. Das Vorderrad muss anscheinend mit einem Schraubendreher vorsichtig herausgehebelt werden.

Danach sollte man die Kabelbinder abschrauben, damit man das Ober- und Unterteil gescheit nebeneinanderlegen kann, ohne das Kabel für den Starttaster aus der Buchse zu reißen *hust*.
Die Oberseite des Mainboards ist recht unspektakulär. Was auffällt, ist, dass die Kabel an einer Stelle, an der auch der Akku angeschlossen ist, mit Heißkleber festgepampt sind.
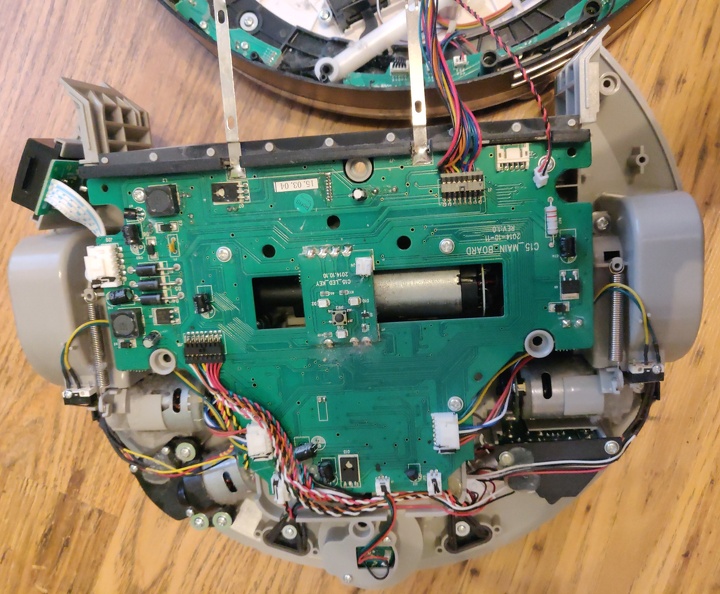
Nachdem man alle Kabel aus den Buchsen gezogen hat, kann man das Mainboard dann auch abschrauben und einen Blick auf die Unterseite werfen.
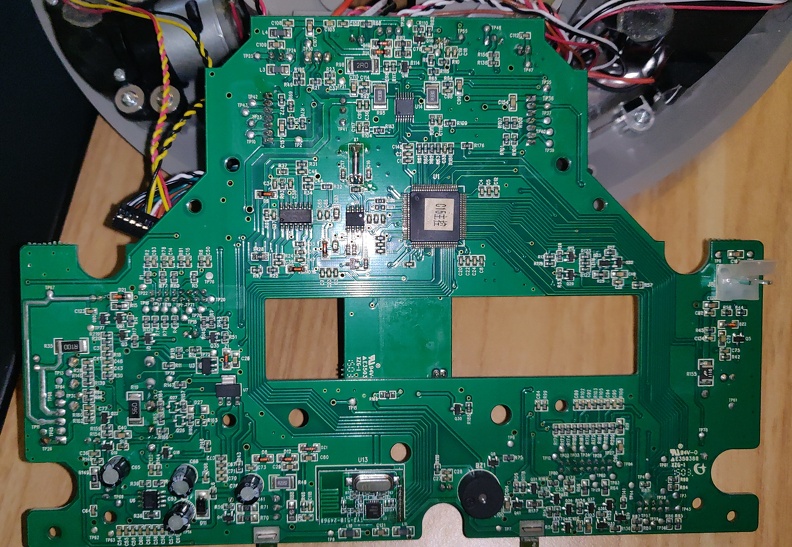
Auf dem Mainboard fanden sich dann folgende ICs:
- LM324 - OpAmp
- 4954LPT - PWM motor driver
- NXP PF85163 - PCF85163 RTC
- 34063 PLBCA - DC/DC converter?
- ARF 2496K - 2.4 GHz transceiver
- STM32F101V8 - Microcontroller, 64K Flash, 10K RAM
Wenig überraschend, dass nur ein “einfacher” Mikrocontroller verbaut ist.
Ich habe auch einen Konnektor gesehen, an dem nichts angeschlossen ist. Ich vermute, dass da was Debug- oder Programmiermäßiges vor sich geht. Zudem sind massenhaft TP (Testpunkte) markiert. Leider fehlt mit ein Oszilloskop, um nachzuschauen, was da los ist. Ich werd als nächstes vielleicht mal mit einem Multimeter die Verbindungen zum Mikrocontroller durchpiepsen.
Ich bin neugierig, wo UART und JTAG hinführen…
Alle Bilder sind in voller Größe in der Bildergallerie zu sehen.
Kommentare / Comments
Isso
Kommentare werden von mir selbst auf einem anderen Server über Isso gehostet.
Comments are hosted by myself on another server, powered by Isso.
Text